글
내용이 많은건 아닌데.. 블로그 특징상 길게 쓰면 이상해 보여요 ㅜ.ㅜ; 절대 내용 많은거 아님
Internal Function
이부분은 아주 간단한 내용입니다. 일반 C 언어 처럼 함수를 선언해서 쓸수 있다는 내용 입니다. 함수의 형식은 일반 C를 따르며, command, event등을 쓰지 않으며, 다른 컴포넌트는 내부 함수는 호출 할 수 없습니다.
예는 다음과 같습니다.
module BlinkC {
uses interface Timer<TMilli> as Timer0;
uses interface Timer<TMilli> as Timer1;
uses interface Timer<TMilli> as Timer2;
uses interface Leds;
uses interface Boot;
}
implementation
{
void startTimers() {
call Timer0.startPeriodic( 250 );
call Timer1.startPeriodic( 500 );
call Timer2.startPeriodic( 1000 );
}
event void Boot.booted()
{
startTimers();
}
event void Timer0.fired()
{
call Leds.led0Toggle();
}
event void Timer1.fired()
{
call Leds.led1Toggle();
}
event void Timer2.fired()
{
call Leds.led2Toggle();
}
}
보시다 시피 startTimers() 란 내부함수가 있으며, 같은 컴포넌트 내에서는 제한 없이 사용 할 수 있습니다.
물론 함수를 사용 하기전에 정의는 되어 있어야겠죠.
Split-Phase Operations
command, evnet, 외 중요한 개념입니다. NesC는 와이어 처리를 컴파일시 하게 되어 있어 콜백 즉 event 시스템은 TinyOS에서도 매우 효율적으로 동작 할 수 있습니다.
Blocking 실행을 해야 하기 때문에 TinyOS에서 컴포넌트를 넘어가며 최적화 하는 능력은 매우 중요합니다. Blocking 시스템(절차적 언어)에서는 프로그램이 매우 긴 수행시간의 함수를 실행시 함수가 실행이 종료될때 까지 시스템이 멈처진 상태에 있게 됩니다. 하지만 Split-Phase 시스템에서는 함수는 최대한 빠르게 리턴되며 Operaion이 종료된 후에는 콜백을 사용 하여 "완료" 신호를 날리도록 되어 있습니다.
| Blocking | Split-Phase |
if (send() == SUCCESS) {
sendCount++;
}
|
// start phase
send();
//completion phase
void sendDone(error_t err) {
if (err == SUCCESS) {
sendCount++;
}
}
|
Split-Phase의 이점은 스택메모리를 실행 될 동안 점유 하지 않으며, 함수의 실행 종료를 기다리지 않으므로 시스템의 정체를 줄이며, 스택의 활용도를 늘리게 됩니다.
Split-Phase 시스템은 TinyOS가 여러개의 작업을 동시에 수행 할 수 있게 하며 메모리를 절약 시킵니다.
Timer.startOneShot 은 Split-Phase의 좋은 예입니다.
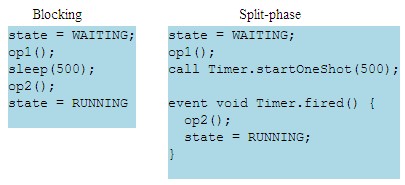
위와 같이 Timer를 절차적으로 사용 하게 되면 Sleep()을 사용하게 되며, 그동안 시스템은 멈추게 됩니다 하지만 Split-Phase에서는 startOneShot()함수 호출후 다른 작업을 수행 할 수 있으며, 타이머는 정해진 시간에 시그널을 날리게 되어 있습니다.

RECENT COMMENT